|
Introduction
Case Organization
Design Variables &
Constraints
Search Engines
(Multilevel)
Evaluation Scripts
Parallel Evaluations
Run & Results
Results Desktop
|
Search Engines (Multilevel)
In the Search Engines (Multilevel) tab the user sets the number of
optimization levels, their type (Evolutionary Algorithm, Steepest
Descent/Conjugate Gradient, SQP) and configures the tuning parameters of
each level. The configuration of each level appears after selecting it from
the pull-down menu evolution features.
Search Engine: Evolutionary Algorithm
Evolutionary algorithms have been traditionally used in EASY as search
engine. The tuning parameters allow the user to select a conventional EA,
its distributed variant DEA, MAEA or DMAEA. All parameters are included in
seven tabs (General, Hierarchical, Distributed,
Convergence, Population, Operators and IPE).
To use evolutionary algorithms at any Search level, the EA tab should be
checked.
General (Settings)
The General (settings) tab allows the user to configure all the settings of
the EA that do not fall into any other category. The tab is split in four
sub-panels:
- Basic Configuration
- Initialization
- Fitness assignment (MOO)
- Design parameters limit adaptation
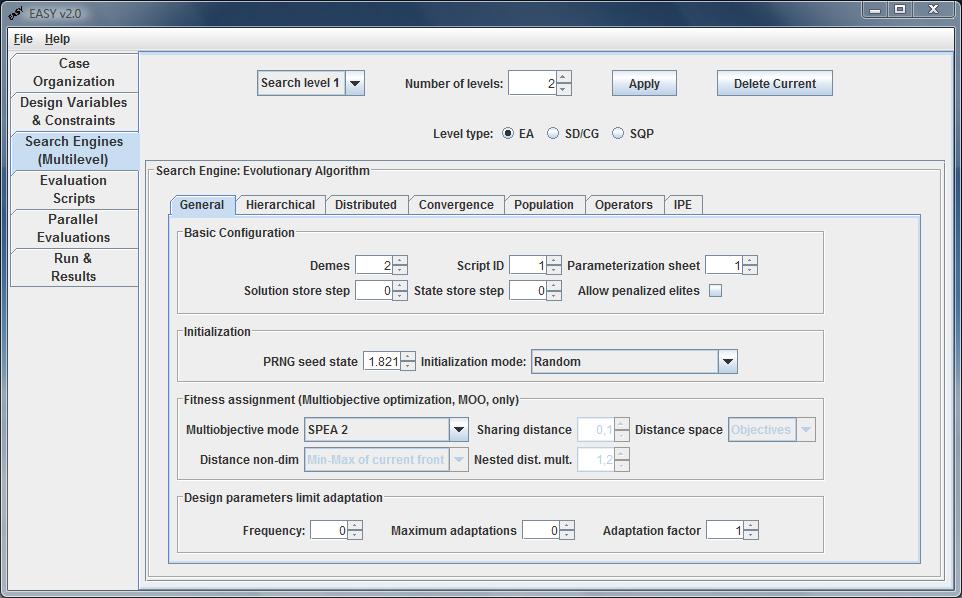
In the Basic Configuration panel the user defines the number of
Demes that will evolve in this level and the Script ID (with
the same numbering as in the Evaluations Scripts tab) that will be
used. The solution is exported in the solution file for a generation step
defined in Solution store step box. The state file, needed in case
of continuation, is updated according to the State store step box.
The second panel is related to the algorithm's Initialization.
The Pseudo Random Number Generator seed is used to initialize the random
number generator. Changing the seed produces a different sequence of (pseudo)
random numbers that affects the evolution and, therefore, the final solution.
The combo box Initialization mode, apart from the default random
initialization, allows the initialization of the population from an ASCII
file.
The Fitness assignment (MOO) panel is enabled only when dealing with
MOO problems and contains some extra settings that have to be specified.
The most critical of them is the Multiobjective Mode which determines
the way fitness score is assigned to the individuals depending on the each
objective score. The available options are:
- Front Ranking
The fitness of each individual is equal to the number of front it belongs.
- Sharing (NSGA)
Like front Ranking but within each front the fitness score is differentiated
depending on the number of individuals in the neighbourhood forcing the
Pareto front to spread in the objective's space. In this case extra
parameters may be set. Sharing distance is a nondimensional number
determining how close the individuals may be to penalize their fitness score.
A value of 0.01 is recommended. The higher the value the more Pareto front is
expected to spread out, in the expense of worsening its position.
Distances are recommended to be counted in the objectives space which
is the space of interest as the results are displayed there and typically it
has a smaller dimension. Nested space is a fictitious space that takes into
account distances in both the variables and objectives space. The distances
in the objectives space are multiplied with the value specified in the
Nested distance multiplier box. Distances are recommended to be
non-dimensionalized with the Min-Max objective or variable of the current
front.
- SPEA 1
Strength Pareto Evolutionary Algorithm. The fitness score of an individual
depends on the number of individuals it dominates.
- SPEA 2
Strength Pareto Evolutionary Algorithm 2. The fitness score still depends
on the number of individuals dominated but a different algorithm is used.
Additional the number of individuals in a neighbourhood is taken under
consideration during fitness score assignment to encourage Pareto front
spreading on the objective's space.
- SPEA 1.5
A SPEA implementation which uses for fitness assignment SPEA 2 algorithm
without the part which encourages front spreading.
The Limits adaptation panel allows variables to get out of the limits
defined in the table in the Desing Variables & Constraints tab
by internally adjusting them. The user selects the Frequency
(in generations) to perform limits adaptation. The Maximum Adaptations
box specifies the maximum allowed number of limit adaptations. Set it to
zero to disable limit adaptation.
Each time a limits adaptation occurs, the variables range (upper - lower
limit) is multiplied by the factor defined in the Adaptation Factor
box. It should be less than 1 to decrease variables range and increase
accuracy. Recommended values are about 0.8.
Hierarchical
In an Hierarchical EA, a low-accuracy, low-cost model is used to evaluate the
populations of an EA, which may therefore explore the search space at low CPU
cost. In the same time, a second EA, which implements a computationally more
expensive tool with higher modelling accuracy, is fed by the elite solutions
identified by the former EA and continues the search for the optimal solution.
The high-level EA uses smaller populations, in order to keep the cost as low
as possible.
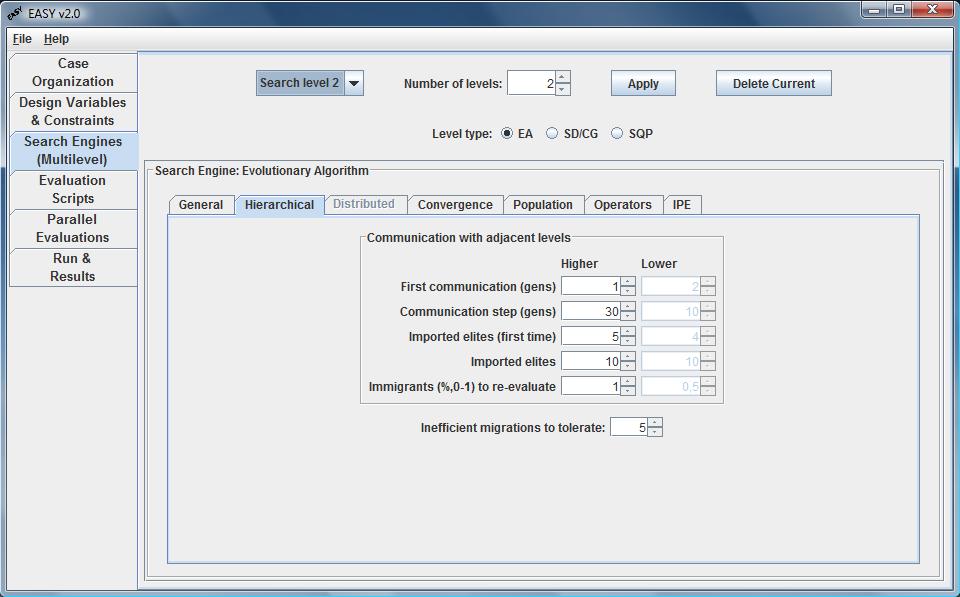
In this tab all parameters regarding the communication between adjacent
levels (higher and lower) are configured. The user defines the generation
to initiate the communication (First communication) as well as the
frequency of communication (Communication step) in terms of
generations. The number of Imported elite individuals (for the first
and the subsequent communications) ia also defined. Some of them are
re-evaluated, according to a percentage of Immigrants to re-evaluate,
while the rest keep their low-cost evaluated fitness. Finally, in the
Inefficient migrations to tolerate combo box the maximun number of
inefficient migrations allowed in=s defined. Thus, the evolution of lower
levels can be terminated if they fail to update the higher level above this
threshold.
Distributed
Distributed EAs (DEA) subdivide the entire population in smaller ones,
called islands or demes, and evolve them in semi-isolation by regularly
exchanging the most promising among their population members. It has clearly
been proved that DEAs outperform conventional EAs.
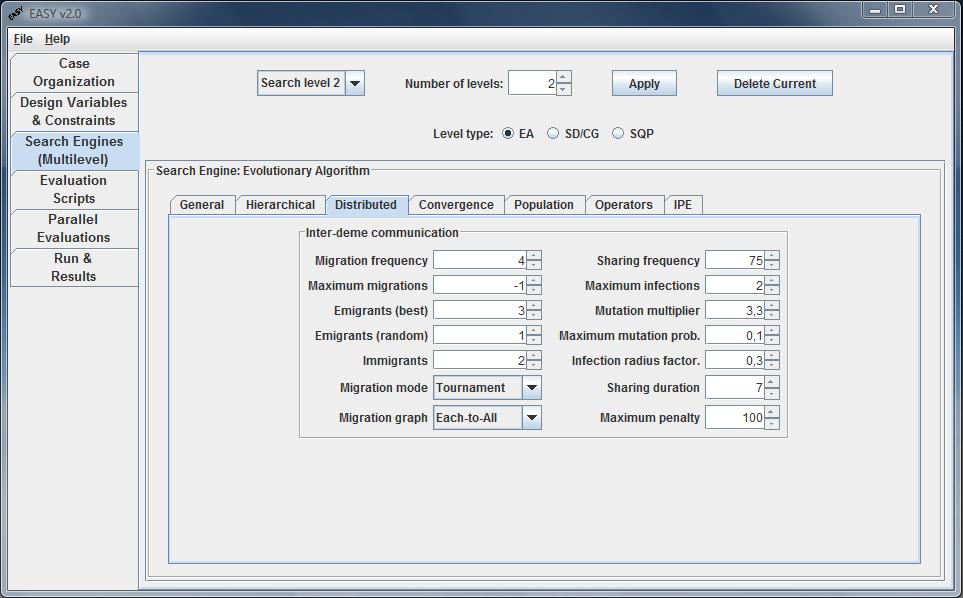
Through this tab, the user handles DEA features. Once the number of demes on
General tab is more than one, the Distributed panel with the
demes communication settings is activated. The user is able to select
the frequency, in terms of generations steps, when migration and
infection occur between the demes, as well as the number of
maximum migrations to perform. If the last one is set up to -1,
infinite number of migrations is allowed. The minimum number of elite
and random immigrants is also defined. The migration mode combo box
defines if the immigrants will replace individuals in other demes
randomly, by means of fitness value (tournament where the
worst individuals are being replaced) or both.
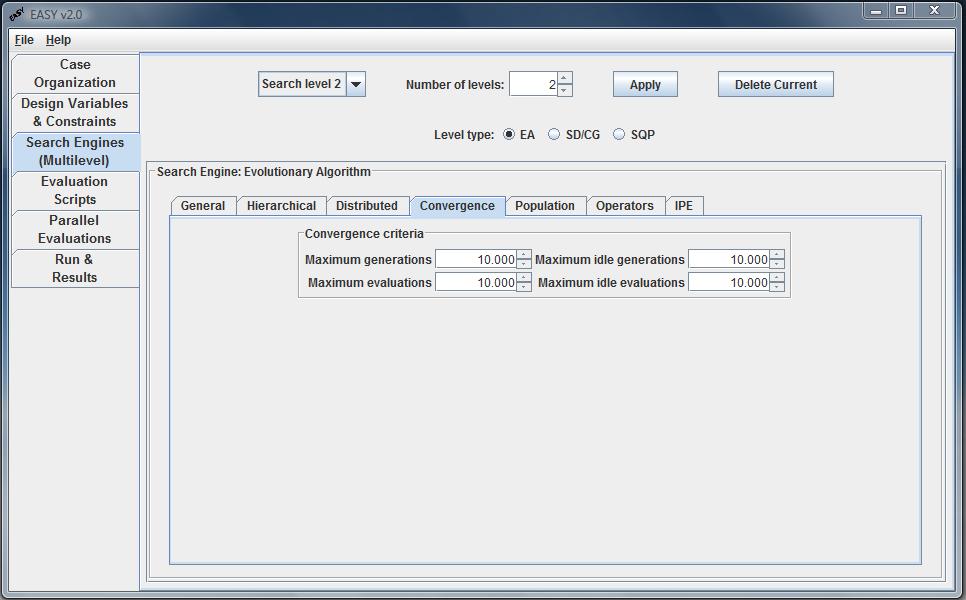
Convergence
EASY stops the evolution when one of the Convergence Criteria is met.
This may be an upper limit to the number of evaluations or
generations, or an upper limit in the number of
idle evaluation or generations. An evaluation or generation is
considered as idle if no better solution is found.
Population
This tab is responsible for setting offspring, parent and elite population
sizes, elitism and parent selection operators.
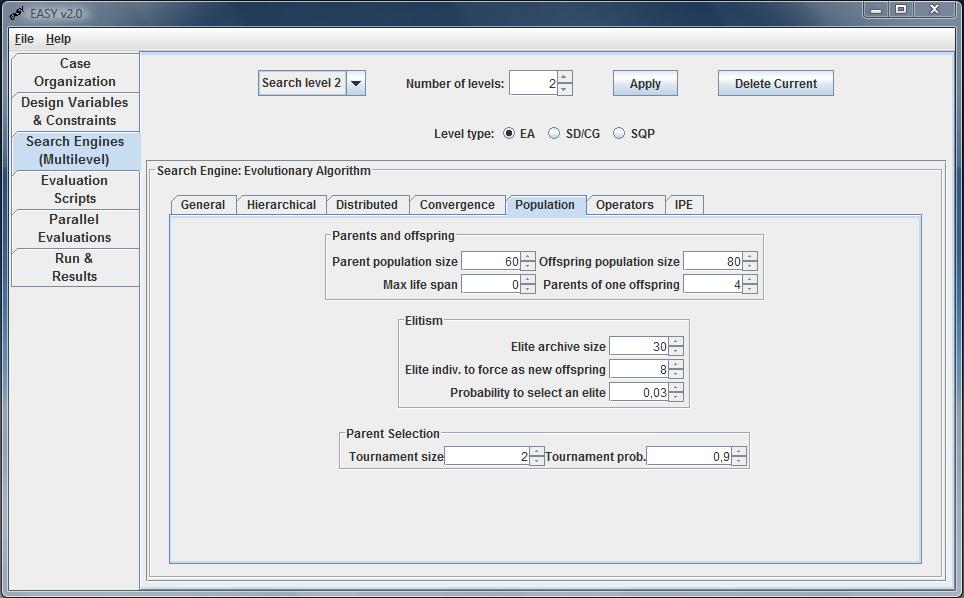
The user defines the population size of parents and offspring.
Recommended ratio between parents and offspring population is about
1/3...1/7 depending on the desired selection pressure. Maximum life
span is the maximum number of generations a parent is allowed to withstand.
The user may also specify the number of parents that form one offspring.
A typical setting for a genetic algorithm is two parents per individual.
A greater number of parents per individual (3-5) is reported to give a
better convergence rate.
A pool of elite individuals is kept which, at any moment, corresponds
to the optimal solution to the problem. In single objective optimization,
the pool consists of the best individuals encountered during the evolution
while in multi-objective optimization this is the maximum number of Pareto
front entries.
In the Elitism sub-panel the Elite archive size is selected.
The pool of elit individuals may be used to forcibly copy some
of them to the current offspring population replacing the worst
offspring. A value of 1-2 individuals is recommended for the corresponding
box. Additionally a random elite individual may be selected as a parent with
a probability specified in the corresponding box (values about
0.01 - 0.1 (1% - 10%) are recommended).
If the parents population size is close or equal to the offspring population
size then the parent selection operator must be active, that is the
number of tournament size must be greater than 1 which corresponds to a
random selection operator. Using the tournament selection a parent is
the winner of a tournament between other parents whose number is specified in
the corresponding box. A recommended value is 2-3. Parents compete with their
fitness score. The probability for the parent with the best fitness to
win is recommended to be in the range of 0.8-1.
Operators
This tab sets the variable coding scheme and parameters for crossover and
mutation operators. Please refer to the relevant subsection for the coding
of your choice for more information on mutation and recombination operators.
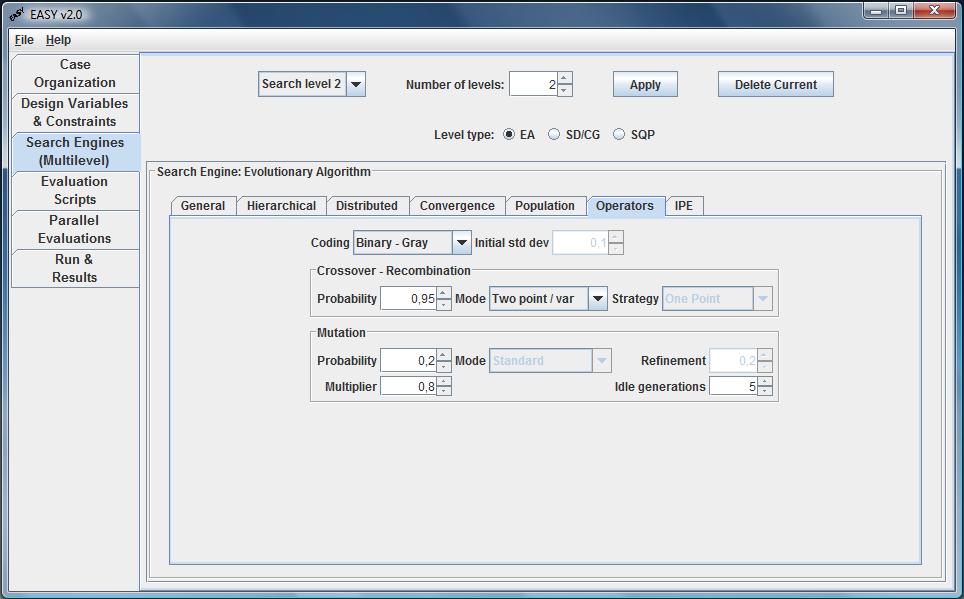
Coding combo box
- Binary
Any individual is represented by a string of binary digits (bits), whose
number is equal to the sum of bits for each variable, as defined in the
variables tab. The range between Min and Max is discretized in 2^b intervals,
therefore the minimum step size of a variable is (Max-Min)/(2^b-1). By
increasing b, the problem complexity increases too but also increases the
expected computing accuracy for each variable.
- Binary - Gray
It is likely that, using binary coding, the representation of two successive
numbers (such as 011111 and 100000) may differ in many bits. Gray coding uses
an additional transformation to ensure that the representation of two
successive numbers differs only by one bit. Often this technique increases
the convergence rate of the algorithm which means that less evaluation calls
are needed for obtaining comparable results.
- Real
The representation of an individual is just the vector containing the real
values of its variables. The accuracy of each variable is equal to the one
supported by the operating system (as good as possible). Since the search
space is expanded more evaluations may be needed. Recombination and mutation
performed to each individual depend on the coding selected.
- Real with Strategy
The representation of an individual is a vector containing the real values
of its variables plus a list of strategy parameters, i.e. parameters which
affect the recombination and mutation operators. Including strategy
parameters in the representation may increase the convergence rate but the
optimization process may be more susceptible to premature convergence.

Initial std dev
Initial standard deviation. This box is enabled only if the Real with
strategy coding scheme is selected. It is a measure of the initial step size
of the variables in the search space. For inexperienced users, the value
0.01 (1%) is recommended.
Crossover-Recombination
The crossover (genetic algorithms terminology) or recombination
(evolutionary terminology) operator produces new individuals by combining
the information contained in the parents. This operator applies with a
probability defined in the Probability box. The recommended value is close
to 0.9 (90%). Depending on the coding of the variables the following
operators can be applied:
- Binary coding (with or without Gray coding)
One point: The binary string is cut at a random point. The sub-strings
are exchanged between the parents.
If each offspring is the outcome of two parents:
If each offspring is the outcome of three parents:
Two point: The binary string is cut at two random points.
One point / var: The binary string is cut at a random point,
separately, for each one of the variables.
Discrete: Substrings that constitute an entire variable are exchanged.
Uniform: A random binary mask is generated of size equal to the number
of bits per individual. The binary string of the new offspring is created by
copying the bits of the parents depending on the value of the mask (0 or 1)
at each position of the binary string.
Two point /var: The binary string is cut at two random points for
each optimization variable.
- Real coding (with or without strategy parameters)
One point:
Like the one of binary coding but extended to real coding. In the above
example the random cut point is variable number 4 and r is a random number.
Two point: Two random cut point are selected and the recombination is
performed as in the case of one point.
G. Intermediate: Variable values of the offspring are chosen between
the variable values of the parents. Recombination for each variable is
performed as

Discrete: This operator performs an exchange of variable values
between the individuals. Each variable is randomly selected from a parent
and copied without further modifications.
No averaging: This operator acts like the generalized intermediate but
the random number r is substituted by

Clearly C does not belong in [0,1] thus the averaging effect in avoided.
Intermediate: Like generalized intermediate but r is always equal to
0.5.
Simulated bin: Using this operator points near parents are more likely
to be selected.
Offspring = 0.5[(1+b)Parent1+(1-b)Parent2], where
b = (2u)^(1/(n+1)), if u less 0.5
or
b = (1/(2(1-u)))^(1/(n+1)), otherwise.
u in [0,1], n in N (great=0), here n=1.
In case of Real coding applied also to the strategy parameters, the
same recombination operators are available for the strategy parameters.
Generalized intermediate is recommended for the strategy parameters.
Mutation
After recombination, every offspring undergoes mutation. The mutation
operator explores the search space by introducing new genetic material in
the population. Offspring variables are mutated by small perturbations, with
low probability. The variables coding determines the operator used:
- Binary coding (with or without Gray coding)
Mutation probability is the probability of mutating a bit in the binary
string (changing from 0 to 1 or vice-versa) and is generally set to be
inversely proportional to the sum of bits of an individual. Thus for binary
coding a mutation rate of (1...3)/bits_total is recommended.
Idle generations: Number of successive generations that no better solution
has been found. If this number is exceeded then the mutation probability is
multiplied by the factor defined in the multiplier box.
- Real coding
The mutation probability is the probability used to mutate any variable of
an individual.
Refinement: Parameter active only in real coding that determines how
much a variable will change if it is mutated. Greater values lead to great
changes. A value of about 0.2 is recommended. The number of idle generations
and the multiplier have the same meaning. Real coding with strategy
parameters: In evolutionary strategies where this coding is used mutation of
the variables and strategy parameters is performed in a way that mutation
probability is not used and thus, it is disabled along with idle generations
and the multiplier that control it. The standard mutation operator may be
changed and use instead of it a step size control mechanism.
Inexact Pre-Evaluation
EASY offers the opportunity to use Artificial Neural Networks as a low-cost
Inexact Pre-Evaluation (IPE) Tool, in order to reduce the number of calls to
the exact evaluation tool. The configuration of IPE is split in two panels.
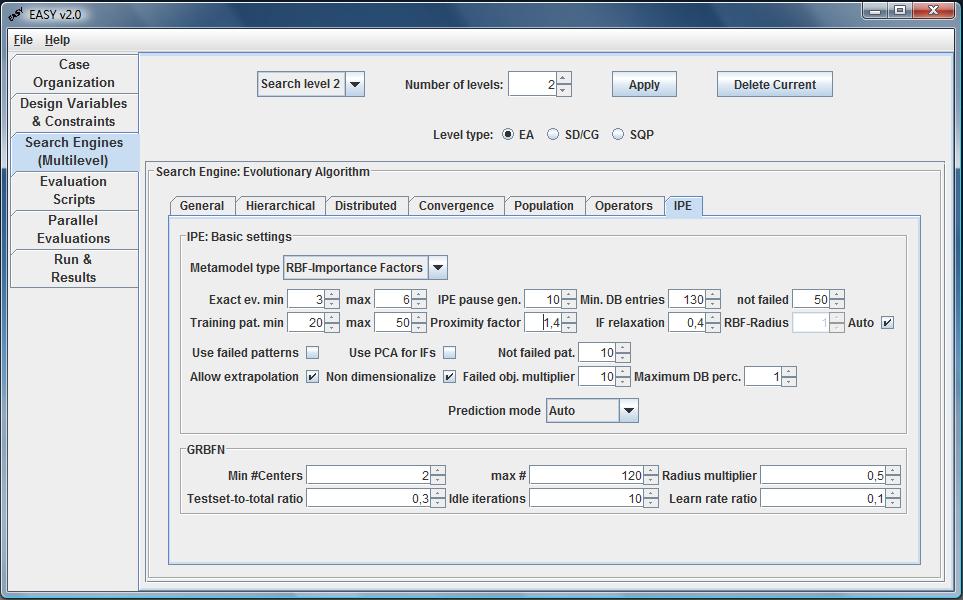
IPE: Basic settings
In the Metamodel type combo box the user selects the metamodel to use
(None, RBF, RBF with Importance Factors, External). Once, a metamodel is
selected, a number of parameteres should also defined.
The minimum number of exact evaluations per generation should be less
than the size of offspring population. A value of 1-5 is recommended. In case
of sticking on local optima for several generations, IPE is paused and
re-enabled again, filling the database with new exactly evaluated patterns.
The Min. DB entries define the minimum exact evaluations to be
performed before starting IPE. The last one is recommended to be greater
than 100.
The minimum number of training patterns is recommended to be in the
range of [8, 20] while the maximum in the range of [12, 30].
The proximity factor determines the exact number of training patterns
used for the training of the network. The higher the value the more close the
training patterns will be to the maximum allowed. A value of about 1.2 is
recommended.
Extrapolation of objectives outside the bounds defined by the training
set is generally not recommended. The Non-Dim checkbox is recommended
to be checked to ensure that the individual that will be predicted is always
between [0,1] after nondimensionalization. If failed individuals are
selected for the training of the network their fitness score will be the one
of the worse selected individual multiplied by the number specified
in the corresponding box. A value of about 10 is recommended.
The use of importance factors improves the prediction capabilities of
the network, particularly in single objective optimization. Importance
factors are updated with a relaxation which is recommended to be
about 0.5.
GRBFN
Growing Radial Basis Function Networks are used when the heuristics suggest
that the neural networks are extrapolating and extrapolation is allowed. In
extrapolation mode the radial basis function centers are computed using an
iterative procedure in which the training patterns are divided into training
and test set using a user-defined ratio. The algorithm iterates until a
user-defined number of idle iterations occur. The user also define
the number of centers (min,max) to use for RBF networks, a
Radius multiplier to multiply the heuristics radius, a
Testset-to-total ratio i.e. the percentage of the patterns to use as
testing set and a Learn rate ratio.
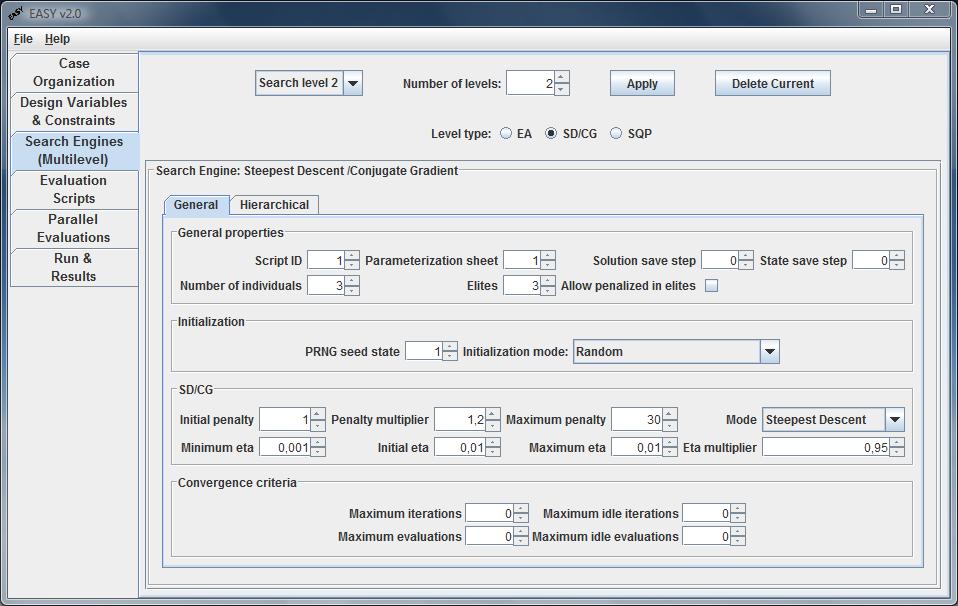
Search Engine: Steepest Descent/Conjugate Gradient
The second search engine implemented in EASY is steepest descent/conjugate
gradient. This search mode is configured in the general tab (hierarchical
tab has the same parameters with EA search engine and will not be discussed).
The general tab is subdived in four panels:
- General properties
- Initialization
- SD/CG
- Convergence criteria
Panels for General properties, Initialization and
Convergence criteria (corresponds to Convergence tab in the
EA search engine) have already been discussed.
In the SD/CG panel, the user may define the descend mode among
steepest descent, conjugate gradient (Fletcher-Reeves variant) and conjugate
gradient (Polak-Ribiere variant) in the Mode combo box. In this
sub-panel, further details conserning the eta value (minimum,
maximum, initial and multiplier) and penalty (initial, maximum and
multiplier) are also defined.
Search Engine: Sequential Quadratic Programming
The third search engine implemented in EASY is the SQP method. Main
parameters are same as in EA and SD/CG search engines, apart from the
SQP sub-panel in the general tab.
In this sub-panel, the user defines the Hessian apprx (BFGS or Damped
BFGS), the trust region radius (min, max, initial), the eta and
the penalty (initial, maximum and multiplier). Finally, an option to
restart SQP in case of poor predictions is available.

|